PRODUCT
경계용 무인자율로봇에 적용되는
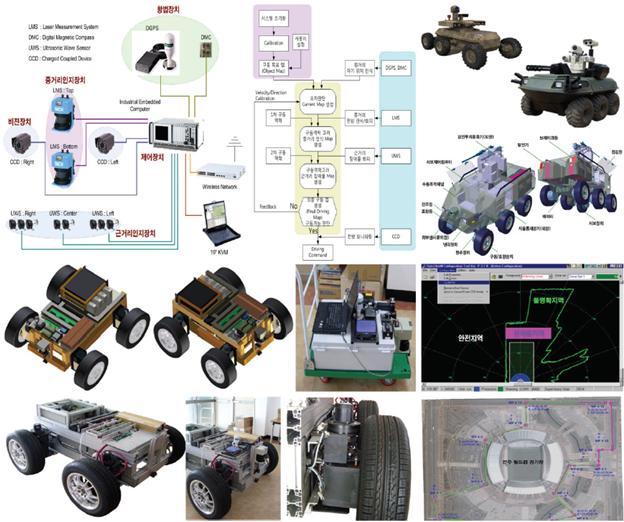
Image Map 생성용 인식장치
경계용 무인자율로봇 (UGV, Unmanned Ground Vehicle) 플랫폼 개발
UGV에 적용되는 Image Map 생성용 인식장치 개발
개발기간 : 2007년 ~ 2009년
관련기관 : ㈜바로텍시너지 / 중소기업청
개발내용
UGV 플랫폼 개발
: 구동과 조향이 독립적으로 가능한 매카니즘
: 전방위 구동 및 제자리 회전가능
Image Map 생성용 인식장치 개발
: 거리별 장애물 인식장치 3중화
: 장거리-비전, 중거리-LMS, 단거리UWS
전원제어시스템
: AC/DC 전원의 다양한 전원공급시스템
: 대용량 배터리로부터 인버터에 의한 AC전환
실내외 항법장치 및 서보구동
: DGPS와 DMC를 이용한 Localization
: 4Wheel+4Driving = 8Servo에 의한 구동 Direction
본사 : 경남 진주시 정촌면 연꽃로 141
지점 : 전북 전주시 덕진구 만성북로 51-25 스페이스온 지식산업센터 3068,3069호
TEL : 055-753-9075/ 063-212-9075
FAX : 055-754-9071/ 063-212-9071