PRODUCT
오프로드 자율주행용 시설농업 관리로봇
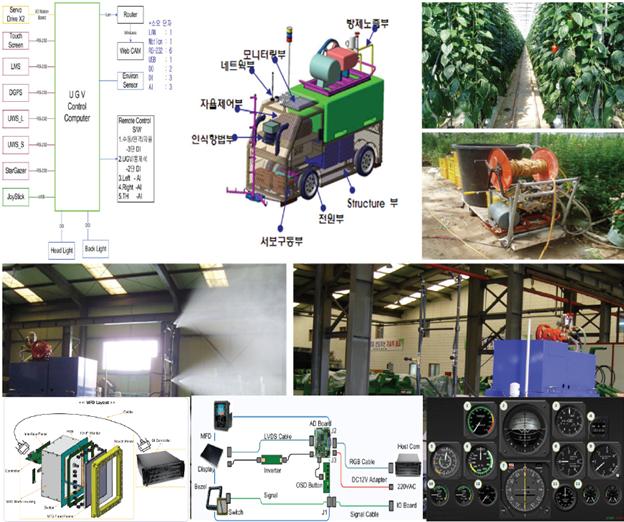
AUGV(Agricultural Unmanned Ground Vehicle)
비닐하우스 등 시설 농내부관리를 위한 오프로드 자율주행 로봇 개발 – 레일/오프로드 겸용
방제시스템, 온도‧이산화탄소 등 시설 내부의 환경 Monitoring
개발기간 : 2007년 ~ 2008년
관련기관 : ㈜바로텍시너지 / 전북대학교
개발내용
무인자율용 인식장치
: Laser/초음파 센서를 이용한 장애물 인식장치 개발
: DGPS 및 Network 장치를 이용한 항법장치 개발
무인자율용 구동장치
: 전기식 Servo 장치를 이용한 주행구동장치 개발
: 배터리 및 인버터를 이용한 전원공급장치 개발
방제작업장치
: 방제동력장치와 미세분무노즐을 이용한 방제시스템
: 노즐의 정류와 분사량 조절을 통한 방제제어시스템
모니터링 장치
: 온도 Sensor 및 이산화탄소 Sensor 적용
: 내부환경 모니터링 및 각종 환경 데이터 기록 저장
본사 : 경남 진주시 정촌면 연꽃로 141
지점 : 전북 전주시 덕진구 만성북로 51-25 스페이스온 지식산업센터 3068,3069호
TEL : 055-753-9075/ 063-212-9075
FAX : 055-754-9071/ 063-212-9071